搜索到
134
篇与
的结果
-
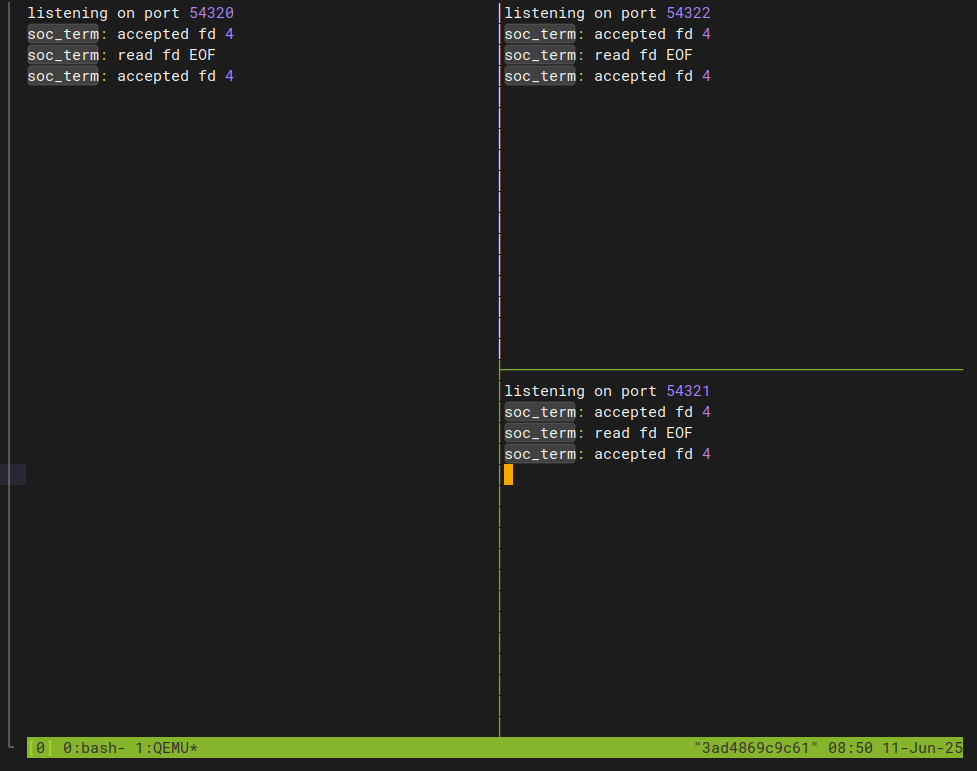
 TMUX的使用 1. tmux的作用命令行的典型用法是打开终端(terminal)后,在里面输入指令。用户的这种与计算机交互的手段,称为会话(session)。在会话中,通过命令行启动的所有进程均与会话进程绑定。当会话进程终止时,该会话启动的所有进程也会随之强行结束。一点最常见的例子就是通过SSH连接到远程计算机。当SSH连接因为网络等原因断开时,那么SSH会话就被终止,这次会话启动的任务也会被强制结束。为了解决这个问题,一种手段就是用户终端窗口与会话“解绑”。即关闭用户端窗口,仍然维持该会话,进而保证用户进程不变。tmux就是这样一款将会话与窗口“解绑”的工具。(1)它允许在单个窗口中,同时访问多个会话。这对于同时运行多个命令行程序很有用。(2)它可以让新窗口"接入"已经存在的会话。(3)它允许每个会话有多个连接窗口,因此可以多人实时共享会话。(4)它还支持窗口任意的垂直和水平拆分2. 安装使用下面的命令# Ubuntu 或 Debian $ sudo apt-get install tmux # CentOS 或 Fedora $ sudo yum install tmux # Mac $ brew install tmux3. 使用直接在终端中输入tmux指令,即可进入tmux窗口。上面命令会启动 Tmux 窗口,底部有一个状态栏。状态栏的左侧是窗口信息(编号和名称),右侧是系统信息。按下Ctrl+d或者输入exit命令,就可以退出Tmux窗口。4. 快捷方式Tmux有大量的快捷键。所有的快捷键都要使用Ctrl+b作为前缀唤醒。$ Ctrl+b s:可以快捷地查看并切换会话 $ Ctrl+b %:划分左右两个窗格。 $ Ctrl+b ":划分上下两个窗格。 $ Ctrl+b <arrow key>:光标切换到其他窗格。<arrow key>是指向要切换到的窗格的方向键,比如切换到下方窗格,就按方向键↓。 $ Ctrl+b ;:光标切换到上一个窗格。 $ Ctrl+b o:光标切换到下一个窗格。 $ Ctrl+b {:当前窗格左移。 $ Ctrl+b }:当前窗格右移。 $ Ctrl+b Ctrl+o:当前窗格上移。 $ Ctrl+b Alt+o:当前窗格下移。 $ Ctrl+b x:关闭当前窗格。 $ Ctrl+b !:将当前窗格拆分为一个独立窗口。 $ Ctrl+b z:当前窗格全屏显示,再使用一次会变回原来大小。 $ Ctrl+b Ctrl+<arrow key>:按箭头方向调整窗格大小。 $ Ctrl+b q:显示窗格编号。参考https://www.ruanyifeng.com/blog/2019/10/tmux.htmlhttps://docs.hpc.sjtu.edu.cn/login/tmux.html
TMUX的使用 1. tmux的作用命令行的典型用法是打开终端(terminal)后,在里面输入指令。用户的这种与计算机交互的手段,称为会话(session)。在会话中,通过命令行启动的所有进程均与会话进程绑定。当会话进程终止时,该会话启动的所有进程也会随之强行结束。一点最常见的例子就是通过SSH连接到远程计算机。当SSH连接因为网络等原因断开时,那么SSH会话就被终止,这次会话启动的任务也会被强制结束。为了解决这个问题,一种手段就是用户终端窗口与会话“解绑”。即关闭用户端窗口,仍然维持该会话,进而保证用户进程不变。tmux就是这样一款将会话与窗口“解绑”的工具。(1)它允许在单个窗口中,同时访问多个会话。这对于同时运行多个命令行程序很有用。(2)它可以让新窗口"接入"已经存在的会话。(3)它允许每个会话有多个连接窗口,因此可以多人实时共享会话。(4)它还支持窗口任意的垂直和水平拆分2. 安装使用下面的命令# Ubuntu 或 Debian $ sudo apt-get install tmux # CentOS 或 Fedora $ sudo yum install tmux # Mac $ brew install tmux3. 使用直接在终端中输入tmux指令,即可进入tmux窗口。上面命令会启动 Tmux 窗口,底部有一个状态栏。状态栏的左侧是窗口信息(编号和名称),右侧是系统信息。按下Ctrl+d或者输入exit命令,就可以退出Tmux窗口。4. 快捷方式Tmux有大量的快捷键。所有的快捷键都要使用Ctrl+b作为前缀唤醒。$ Ctrl+b s:可以快捷地查看并切换会话 $ Ctrl+b %:划分左右两个窗格。 $ Ctrl+b ":划分上下两个窗格。 $ Ctrl+b <arrow key>:光标切换到其他窗格。<arrow key>是指向要切换到的窗格的方向键,比如切换到下方窗格,就按方向键↓。 $ Ctrl+b ;:光标切换到上一个窗格。 $ Ctrl+b o:光标切换到下一个窗格。 $ Ctrl+b {:当前窗格左移。 $ Ctrl+b }:当前窗格右移。 $ Ctrl+b Ctrl+o:当前窗格上移。 $ Ctrl+b Alt+o:当前窗格下移。 $ Ctrl+b x:关闭当前窗格。 $ Ctrl+b !:将当前窗格拆分为一个独立窗口。 $ Ctrl+b z:当前窗格全屏显示,再使用一次会变回原来大小。 $ Ctrl+b Ctrl+<arrow key>:按箭头方向调整窗格大小。 $ Ctrl+b q:显示窗格编号。参考https://www.ruanyifeng.com/blog/2019/10/tmux.htmlhttps://docs.hpc.sjtu.edu.cn/login/tmux.html -
-
-
-
-
-
-
-
-